
Work
Currently, I am a part of the development and engineering team that is working on building the very first High-NA EUV Lithography System (TWINSCAN EXE500).
Ph.D. Research
I worked as a graduate research assistant in the Physical Human-Robot Interaction Laboratory (pHRI Lab), which is directed by Dr. Yun Seong Song. The project - “Human Arm Impedance Modulation during Overground Physical Interactions”- was funded by National Science Foundation. During Ph.D, I worked on two different projects briefly descried below.
Development of an Interactive Robot for Overground Physical Human-Robot Interaction
Phase I: Development of an interactive robotic arm
Due to the unique characteristics expected from the robot (i.e. capable of performing overground physical human-robot interection and simultaneously measure human arm impedance), we decided to desing and build the robotic manipulator in our own lab. The kinematic and dynamic characteristics required were identified. The second order non-linear dynamics of the robotic arm was derived and a simulation model was developed in Matlab. The simulation model not only helped us weighing up the effectiveness of the robotic arm based on its endpoint impedance but also will helped us design and develop an effective control algorithm. After validating the desing using simulation model, it was crucial to get actuators, sensor, controllers and accessories that would meet the design requirements. Kollmorgan’s actuators and AKD drivers (BLDC servo motors - to reduce friction), ATI force/torque sensors, and National Instrument’s cRIO real time controller were chosen.
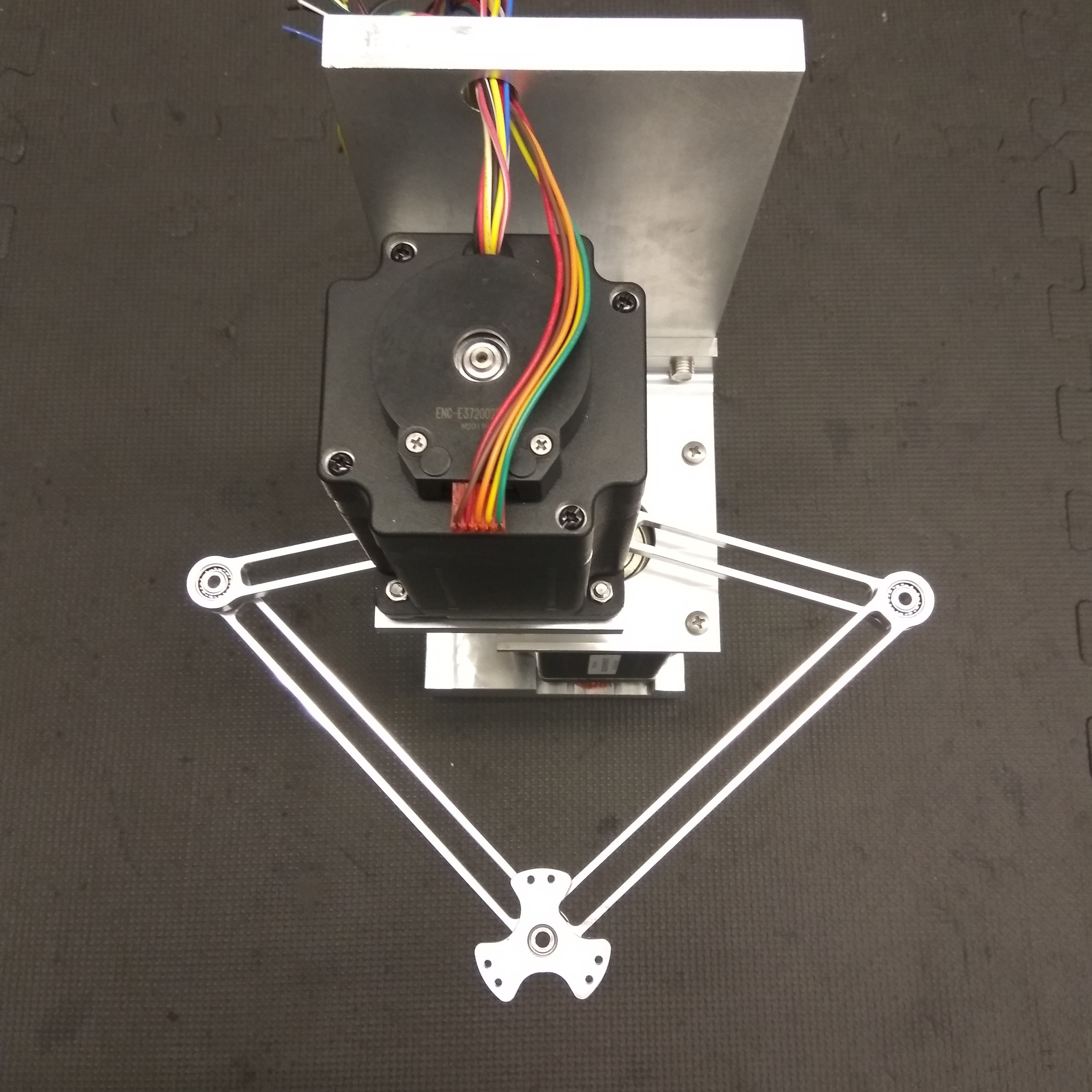
Figure. First prototype of the robotic arm.
Phase II: Body frame and the mobile base
An autonomous mobile base (a direct drive four wheel robot) was outsourced from SuperDroid Robots. The body frame that would lodge the interactive arm and the electrical accessories was designed as a 3D CAD model. It was then fabricated in the university workshop using CNC machining. All the three subsystems - robotic arm, body frame, and the mobile base - were assembled in our lab.
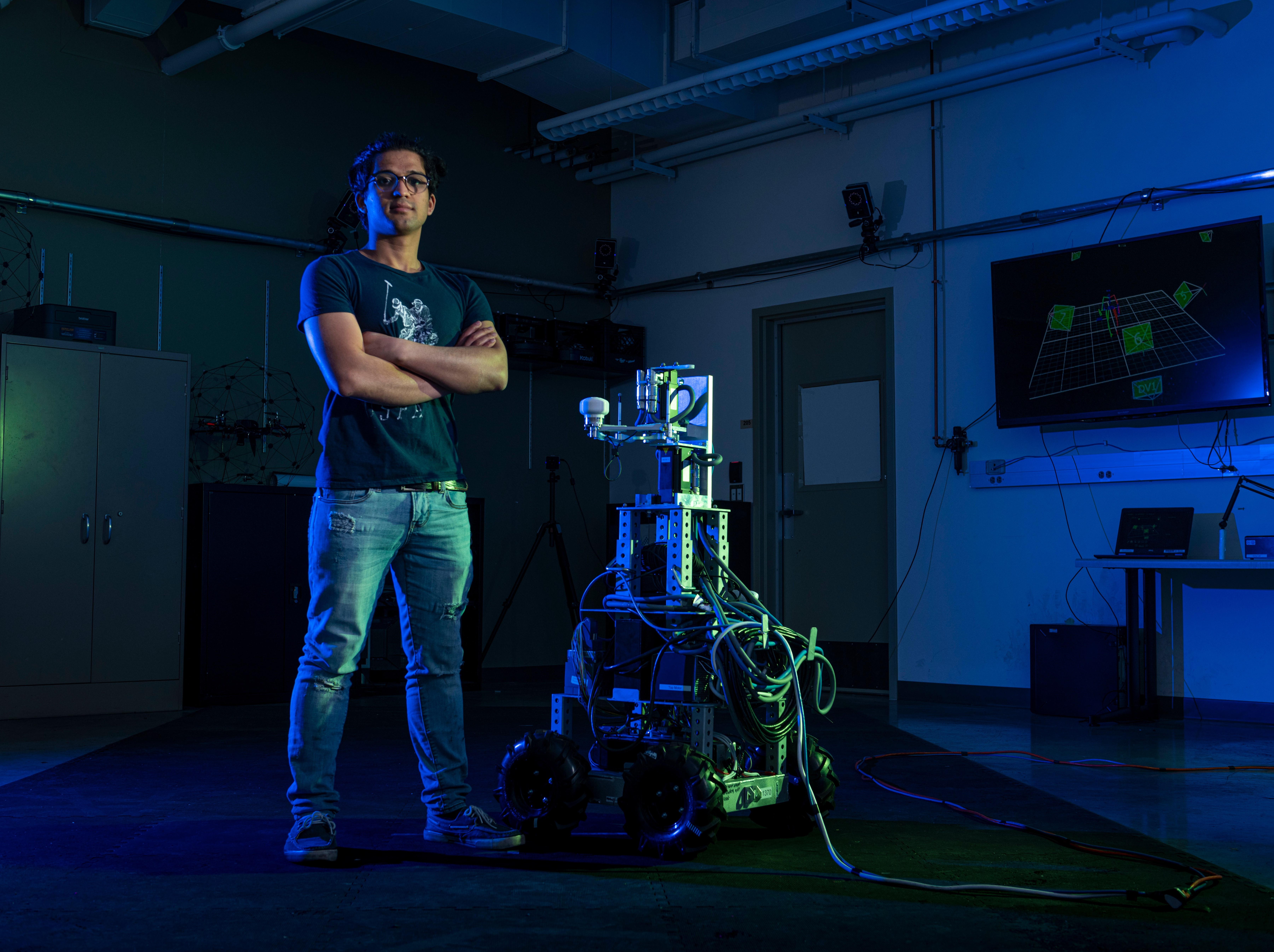
Figure. Me and the novel robot built for overground physical human-robot interaction.
Phase III: Control architecture
Designing a control framework followed next. A design decision was made to use NI cRIO as a single point of control (processor) for both the manipulator and the mobile base. I outlined a control framework using LabVIEW software such that the lower base was controlled through a simple PID position control algorithm whereas the robotic arm was programmed to operate through either position control or position based force control (impedance control).
The robot - named as Ophrie - takes velocity command from cRIO for overground movement. The robotic arm also takes command from cRIO for position/force control at the endpoint. Force information, from the force sensor at the handle, and position data, from the servo motors, is accquired to make control decisions.
Human Arm Impedance Measurement during Overground Physical Human-Robot Interaction
A novel physical human-robot interaction (pHRI) experiment was designed to (a) validate whether the robot met the design requirements, and (b) test our hypothesis and understand the process of communication through physical interactions.
During the overground pHRI experiments, Ophrie acted as a leader - a speed controlled trajectory tracker robot, whose arms were controlled using impedance controller but provided occasional force perturbation at the interaction handle. The interaction handle, situated at the endpoint of the manipulator served as the only point of communication to the blindfolded human follower during the experiment. Robot motion data were recorded using wheel encoders and vicon motion capture system, whereas movement of human body parts were recorded using vicon motion capture systems and motor encoders.
My other responsibilities specific to this experiment include acquiring an IRB approval, designing the data acquisition and synchronization technique, recruiting and interacting with the human participants, preparing and maintaining the experiment setup, conducting the experiment, pre/post-processing the data and analyzing the results to extract meaningful information. From the novel experiments, we hae some very interesting findings on how we exchange information through physical interaction and how our arm impedance facilitates the entire process.\
Undergraduate Project
Conceptualization and Fabrication of Mini-Tunnel Boring Machine
Worked together and coordinated with three other group members to come up to a concept of a portable and affordable boring machine for smaller boring projects. The concept latter was implemented as a fabricated demo model.
Click here to watch the video of the fabricated demo mini-tunnel boring machine.